ORBSLAM2+Octomap feltérképezése : az ORB-SLAM2 egy nyílt forráskódú SLAM-keretrendszer, amely támogatja a monokuláris, távcső, meg RGB-S kameraKi tudja számítani az jelentenek a kamera valós időben, illetve rekonstruálni, hogy a környezet ritkán 3
D-ben, ugyanabban az időben.Az RGB-D mód, az igazi skála információt lehet beszerezni.RTAB-Térkép 3
D-s Vizuális leképezés, illetve navigációs:Segítségével a RTAB algoritmus, hogy integrálja a látás, a radar, a robot rájön, hogy 3
D-s vizuális leképezés, illetve navigációs akadály elkerülése, valamint támogatja a globális áthelyezés, illetve önálló elhelyezése.Media
Pipe fejlesztési:Keresztül a Media
Pipe fejlesztési keret, a funkciók kézi érzékelő, testtartás felismerés, általános felismerés, arcfelismerés, 3
D felismerés, illetve elismerés befejeződött.Lidar feltérképezése, valamint navigációs elkerülve:képes felismerni gmapping, hector, karto, térképész feltérképezése algoritmusok, támogatása, útvonal tervezés, dinamikus akadály elkerülése, egyetlen pont, illetve multi-pont navigáció.Multi-robot navigációs:Több robotok ugyanazon a térkép eléréséhez egypontos navigáció, multi-point navigáció, dinamikus akadály kikerülése.ORBSLAM2 feltérképezése : https : Teljesen automatikus inicializálás segítségével GÖMB funkció extrakciós módszer.Mélység kép adatok / pontfelhő kép : https : A mélység térkép, színes térkép, valamint a pontfelhő térkép a kamera keresztül lehet hozzájutni a megfelelő csomópontok.Multi-robot szinkronizálás ellenőrzés : az Egyik kezelni ellenőrzések több robotok valós időben, kiegészíti a tiszta, egyenletes mozgását, aztán rájön, hogy a funkció a szinkron vezérlés.Multi-robot sorban mutatják,:Több robotok fenntartani három képződmények, valós időben.RRT feltárja épít térképek függetlenül:Állítsa be a feltárási területen, majd használja az RRT algoritmus észre, önálló kutatás, térképészeti, térkép mentése, majd térjen vissza a kiindulási pontját.KCF célkövetés:Alapú image korrelációs KCF algoritmust választhatja ki, bármilyen tárgy, a kép, majd kövesse a cél, valós időben.Robotpilóta:Támogatja az egyéni színválasztás, a robot tud automatikusan azonosítani, a szín a területen, hogy kövesse a sort.Szín Elismerés/Követés : az Válassza ki egy adott színű terület a képernyőn, majd hagyja, hogy a robot nyomon ezt a színt, valós időben.AR címke felismerés:támogatja a dinamikus nyomkövetési kimutatása QR kódot, címkék, valamint beszerzi a póz koordinátáit QR-kód, valós időben.AR valóság mellnagyobbítás:Válassza ki a megfelelő grafikus át az ALKALMAZÁST, majd hagyja, hogy a grafika jelenik meg a kockás papír keresztül AR javító technológia.Vizuális kép szépítés : az A kép által átalakított Open
CV, valamint a megfelelő algoritmust használják, a hatás eléréséhez a kép szerintem.Lidar őr:Célokat, amelyek közelebb állnak a lidar lesz zárva, az első a robot autót, mindig szembe ez a cél.Lidar akadály elkerülése:Lidar érzékeli, hogy a környezet valós időben, illetve a tervek apath, hogy elkerülje az akadályokat.ROS robot tanulás készlet több verzió : Yahboom biztosít 4 fejlesztési tanács változatai ROSMASRER X3, szabadon választhat Jetson Xavier NX, Jetson tx2 alatt repülő üzemeltető-NX, Jetson Nano vagy Raspberry Pi 4
B alapján a különböző teljesítménybeli problémák, ezek a fejlesztési tanácsok, A sima művelet, érdemes megfontolni, Yahboom javasolja, hogy a költség-hatékony Jetson tx2 alatt repülő üzemeltető-NX.
Tartós fedél élelmiszertároló tartályok pattan egy szűkTerület fedél társkereső / címke.Úgy tervezték, hogy illeszkedjen a Rubbermaid 5723, valamint 5724 kör tároló konténe
Alkalmazandó modell : Xbox XBOXONE KonzolCsomag tartalma : 1x Xbox Egy HDMI csatlakozó.Javítani a törött HDMI Aljzat.Kérjük, győződjön meg arról, hogy ez a modell termék típusa
Egyedi nyomtatott magas fényű kép szublimált közvetlenül a fehér, fényes külső felületIlleszkedik a legtöbb pohártartó.Nem az a célja, a mosogatógép vagy a mikrohullámú s�
CSOMAG tartalma : 1 tekercs curling szalag 100 méterMERÉSZ SZÍN : Hozz egy kis dekoratív érzéke, hogy bármilyen ünnep, ez a curling szalag, amely tartalmaz egy merész színe fehér
GYÖNYÖRŰ VEGYES MÉDIA KEFE A művész, festék, ecsetek ideális multimédia projektek, beleértve akril, olaj, akvarell, illetve gouache festményLUXSZINTETIKHAJ Minden ecset alakú j
BőrMagas Minőségű : A tote táska készült prémium minőségű anyag, amelyet szakemberek, akik 30 éves tapasztalattal.Gondosan szabás, Egyszerű, de elegáns design, kiváló minős
ANYAG, Ez a Kétoldalas Nyomtatott Kecske Tisztálkodási Táska Készült Vízálló Poliészter Utánzat Vászon a Karcsú Cipzár Hardy Minden Smink Táska Csomagolva egy Cipzár Átláts
Tépőzáras & Fényvisszaverő Csík A kiváló minőségű Tépőzár segítségével nyissa ki vagy csukja be a táskát, több, könnyen, gyorsan, mint a cipzárA fényvisszaverő csík
TPU+PUMade in USA, vagy az Importált.Készült tartós PU, átlátszó TPU anyag, ez a telefon az esetben a vízálló, tartós, tapintható.Jön egy nyakpánt, hogy lehet lógott a nyakán
Az országban, mint Jelölt 100% vadonatúj, minőségi,könnyen állítható a hossza, hogy illeszkedjen a csuklóját,egy méret mindenkinek.Célja a Garmin nézni,Különleges tervezésű
Chips Kapu alakult 2010ben, egy professzionális beszerzési B2 B & B2 C eszköz elektronikalkatrészek mezőMár több mint 200.000 vonalak raktáron lehetnek szállítjuk 1 3 munkanapon be
Mandula Nyomja meg a Köröm Könnyű viselet, valamint a kirakodás által ártalmatlan ABS anyag, nem könnyű chip vagy eltörik, vagy elhalványul, nem árt a körömKözepes Hamis Kör
Ez a termék kell fújt minden alkalommal,Ha egy rajongó nem kell egy rajongó, egy képet, anélkül, hogy egy rajongó, köszönöm!Random szállítási nagy express Color : mint az áb
A Termék Típusa : Labor KínálatCsomag Mennyiség : 1 Származási Ország : Egyesült Államok.Csomag Súlya : 1.AMCO Egyértelmű, az EPA által jóváhagyott elsődleges standard kalib
1 darab FEL könyök 90 fokos, 1 darab LE könyök 90 fokos usb30 hosszabbító kábel tökéletes helytakarékos, majd a kapcsolat a szűk térben.A superspeed USB 3 Támogatja a Szuper seb
☁ [PUHA PÁRNÁZÁS] Box Wave Esetben Kompatibilis LG Q7aSoha ne aggódj a biztonsága a Q7a újra!A Soft Suit a Zsebében esetben bölcsője MINDENKÖRÜL neoprén padding, a maximális V
? [ÍZLÉSES DESIGN] Box Wave Esetben Kompatibilis A Samsung Galaxy J7 AuraEgy tiszta, hip a modern stílust a KLASSZIKboríték design, az Elite Leather Messenger Tok álló, a hatékonysá
Conbovo Kristály Műanyag Nyomtatás Kemény Héj burkolata Kompatibilis modellek Mac Book Air 13 hüvelykes Touch ID 20182022 Kiadás(típusszám : A2337 M1 / A2179 / A1932) Kérjük, elle
1 Tartalom : Az Ókori Egyiptom Matricák, Elveszett Civilizációk Piramis Szfinx Fáraó Vízálló Vinyl Matrica, Matricák Anyag : Vízálló Vinyl Matricák, újra felhasználható, tar
Full HD (1920 x 1080, 60 Hzes) Kijelző IPS w / LED háttérvilágításKontraszt arány : 1000 : 1 statikus; 5000000 : 1, dinamikA kijelző betekintési szög : 178° vízszintes; 178° fü
Tiszta Szakaszon MágikGyöngy & Ékszerek Kábel Nagy Gyöngy, Drót & Karkötők, Hogy & NyakláncEz egy új tekercs tiszta Szakaszon Mágikgyöngy ékszerek kábel.Jó azért, hogy karkö
MÉRET : Azt méri, 9ANYAG : A smink táska anyaga tiszta pamut anyagból, tartós, könnyű, kényelmes kapcsolatot.Ez szerepelt egy sima fekete cipzár.Kérjük, ne merítse őket közvetl
ABS ANYAGSegítségével kiváló minőségű ABS magas égésgátló anyagok, tartós, hosszú élettartamúADATOK a KETTŐS KIJELZŐTámogatja a kettős kijelző feszültség, aktuális ad
☁ [PUHA PÁRNÁZÁS] Box Wave Esetben Kompatibilis LG K9 Soha ne aggódj a biztonsága a K9 újra!A Soft Suit a Zsebében esetben bölcsője MINDENKÖRÜL neoprén padding, a maximális V�
ABS ANYAGSegítségével kiváló minőségű ABS magas égésgátló anyagok, tartós, hosszú élettartamúADATOK a KETTŐS KIJELZŐTámogatja a kettős kijelző feszültség, aktuális ad
Kapsz a maximális teljesítmény a tömítés anyagok használata a tömítés telepítési eljárás [1] a tiszta, vizsgálja meg a karimák, a felszíni vagy a részek, amelyek megkövete
Magas minőség szemöldök borotva rozsdamentes acélból készült penge éles, rozsdamentes, tartós, a felület, a kilincs polírozott, sima, finom, kényelmes a kezétBiztonságos Terv
Anyaga rozsdamentes acél kapacitás : 21oz 2 csavar caps 1 könnyűflow inni kiöntő, 1 standard kap carabineer klip is tartalmazza.Illeszkedik a legtöbb pohártartó.Nem az a célja, a
Az SSS stílegyes szálak kenni egy speciális folyamat, amely Biztosítja, alapos kenést egy hosszabb csomagolás életSSS stílcsomagolás egy nagy teljesítményű csomagoló, amely jól
Gumi talpA GORETEX réteg segít távol tartani a víz, így a láb száraz marad.Az új gaiter a gallér magasabb hogy segítsen megőrizni extra törmeléket, hogy víz kerüljön a cipő.
MENNYISÉG Ez magában foglalja 69 db vegyes alufelni hold, csillag, nap varázsa medálok, 23 stílusok, minden stíldbMAGAS MINŐSÉGŰ Készült jó minőségű ötvözet fém használh
A csipesz kifejezetten a profi precíziós feladat oltása szempilla, tervezték, hogy megfeleljen az a követelmény, hogy a szempilla hosszabbítás munkaKészült prémium minőségű seb
Rozsdamentes acélból készültFlip fel kiöntő kivehető csepp a pohárban.Magasfényű Bevonattal Fehér külső; kép nyomtatása mindkét oldalon.Illeszkedik a legtöbb pohártartó, k
Rozsdamentes acélból készültFlip fel kiöntő kivehető csepp a pohárban.Illeszkedik a legtöbb pohártartó, kapacitás 21 gramm.Nem az a célja, a mosogatógép vagy a mikrohullámú
Anyag : erdeifenyő biztonságos 304es rozsdamentes acél, a pan antirozsda antikorróziós, tartós, nehezen viseli, állva, hogy hosszú távú használata a kereskedelmi környezetbenNagy
MÉRET : Azt méri, 9ANYAG : A smink táska anyaga tiszta pamut anyagból, tartós, könnyű, kényelmes kapcsolatot.Ez szerepelt egy sima fekete cipzár.Kérjük, ne merítse őket közvetl
Zsebfésű a Szakáll : Pocket méret, szakáll, bajusz comb tökéletesen illeszkedik a zsebében vagy a táskájában, zsebében, így vőlegény az arcszőrzet, bárhol, bármikorEz a tar
1x Nagy Kozmetikai Táska 1x Közepes Kozmetikai Táska 1x Kis Kozmetikai Táska ✓【3 / Különböző Méretű】Nagy Táska (átlátszó) : 9.9" H; Közepes Táska : 7.1" H;Kis Táska
?【KELL AKRIL FOLYÉKONY szög KIT】Saviland akril köröm készlet tartalmaz 1db 120ml akril köröm folyadék, 1db 15ml köröm dehydrator, 1db 15ml nem savas PH bond, 1db porcelán kör
Csak A Kézi MosogatásNCAA football irányító alakú üveg vizet, hogy jó móka gyerekeknek, a sport rajongók, hogy igyon.Hivatalosan engedélyezett 5" x 10" vizes palackot jön a kül�
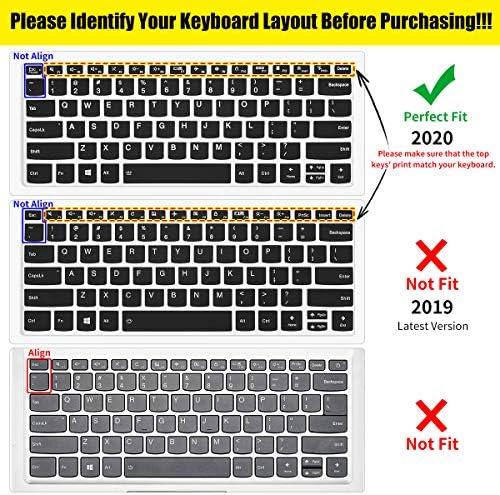
【!!!Hasonlítsa össze A billentyűzetkiosztásKÉP 2 erősítse meg, ha elfér】Tökéletes illeszkedést a Lenovo Flex 5 14" 2in1 Laptop, Lenovo Yoga 5i 9i 2 az 1ben 14", Lenovo Yoga 7
50 MM SOFŐR EGYSÉG : megőrzi kristálytiszta magasságra, buja középkategória jegyzetek, dübörgő zenét; könnyen megkülönböztetni irányban lépéseket, lőtt vagy beszélgetés
Nagy Üveg Vizet : A 64oz / fél liter folyadék kapacitás, Ez a végső üveget, hogy az intézkedés a napi bevitt víz, a lényeg, hogy maradj hidratált, illetve győződjön meg róla
☁ [PUHA PÁRNÁZÁS] Box Wave Esetben Kompatibilis LG K11 Soha ne aggódj a biztonsága a K11 újra!A Soft Suit a Zsebében esetben bölcsője MINDENKÖRÜL neoprén padding, a maximális
Magas minőségű szövet teljes bélés,teherbíró, ugyanakkor könnyűPárnázott vállpántok széles, magas áteresztő képesség anyag,csökken a nyomás, a váll, nyak.Hozzávetőleg